

Tanken är att jag här ska lägga ut lite bilder och fakta från mitt senaste
projekt, en robot som jag ska kunna hjälpa mig att klippa gräs, skotta snö mm.
Gräs ska den kunna klippa själv, vid snöplogning har jag tänkt mig att man ska
stå på den och manuellt styra den för att den ska få lite bättre fäste för
hjulen på halt underlag.
Den ska bli som en slags redskapsbärare som man kan hänga på klippaggregat, plog
eller kanske en mossrivare och kanske andra saker som jag inte kommit på ännu.
Jag ägnade de första månaderna till planering, frågorna var många, och detta är de viktigaste besluten jag tog:
Vad ska den klara av?
Självständigt kunna klippa gräs, ploga snö om jag står på den och styr den.
Hur stark behöver den vara om jag t.ex ska kunna ploga snö med den?
De motorer jag fick tag i är specade 33A i startström, då borde det gå att
belasta dem korta stunder upp till 20A. En hastig överslagsberäkning skulle då
ge 24V * 20A = 480W / motor i inmatad effekt. Låt säga att verkningsgraden i
motor + växel är 50% så borde 2 motorer ge ca 480W ut på hjulen. Jag har 28,12:1
i planetväxeln och sedan får jag 1,5:1 (tot 42:1) med hjälp av kedja och drev (se bilder
nedan). Med den utväxling jag valt så borde detta ge tillräckligt med dragkraft,
(enl. mina beräkningar 30kg) men vi får se, jag kan alltid öka utväxlingen
senare.
Hur stor ska den vara?
Så liten som möjligt, men batterierna och motorerna tar en del plats, och jag måste få plats med fötterna på den.
Hur många hjul ska den ha?
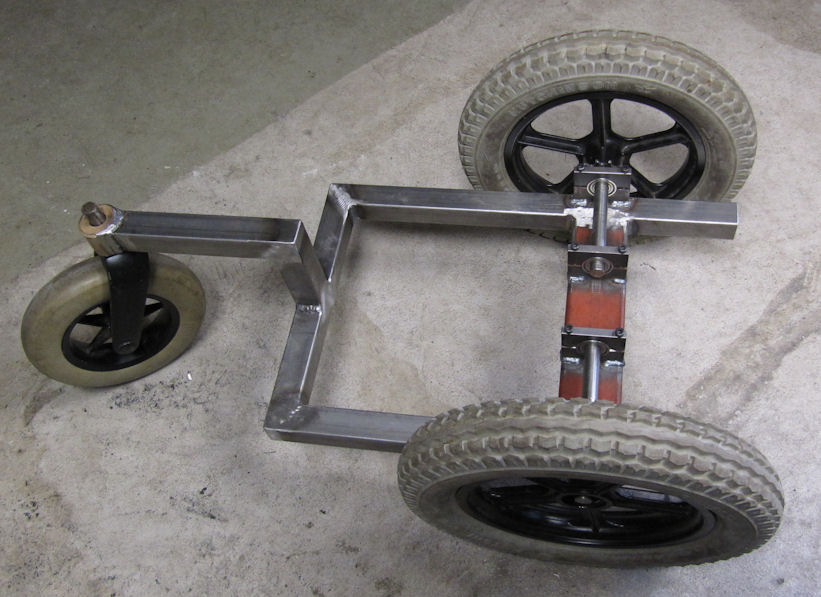
Jag bestämde mig till slut efter långt och länge för en trehjulig variant, två
drivhjul och ett svirvelhjul som stöd (se bilder nedan).
Hur fort ska den gå?
Med den utväxling jag nu valt så går den max 4,5km/h.
Hur ska jag styra den?
Jag kommer att använda mig av ett styrkort/motor och ett huvudkort
(moderkort) som
kommunicerar med motorkorten.
Vilka säkerhetsaspekter bör jag tänka på? Den ska ju helst inte gå rakt
genom staketet in till grannen om något blir fel.
Säkerhetsfunktioner:
Här är lite anteckningar som jag kladdat ner, inget bestämt men saker som jag funderat på:
Funktioner:
Känn av batterispänningen, bryt om för låg.
Känn av klippmotorns ström för att avgöra om det finns oklippt gräs under den.
Känselspröt som känner av om något är i vägen.
Möjlighet att köra manuellt eller i auto, + ev. radiostyrning.
Stäng relät om ingen aktivitet under 5 min.
Int2 är kopplad till alla fyra ”känselspröten”, mjukvaran får avgöra vilken ingång som är aktiv.
Om kommunikationen upphör under 1-2 sek, stanna motorerna.
Manuell körning:
2 analoga ingångar med pot:ar för att ställa hastighet och riktning.
OBS! Bildtexterna är ovanför bilderna, kanske är detta fel, men så är det.
Nästa steg är att börja samla på mig delar som kan vara användbara. Här är några exempel på vad jag lyckats få tag i.
Batterier 2 st 12V-28Ah 2 st hjul från en elrullstol, ytterdiameter 32 cm
Svirvelhjul från elrullstol, diameter 20 cm
2 st DC-motorer från elrullstol (ej samma som hjulen är från)
Spec: 24Vdc, 3350rpm, växel 28,12 : 1, 120rpm utg axel, Inom 4,9A, Istart 33A


Nu börjar bygget! Jag börjar att tillverka lite smådelar.
Eftersom jag inte har hittat 8 resp. 12-kuggars drev så gjorde jag dom själv. Ger 1,5:1 utväxling.

Lilla kugghjulet som ska sitta på motorn färdigt med kilspår.


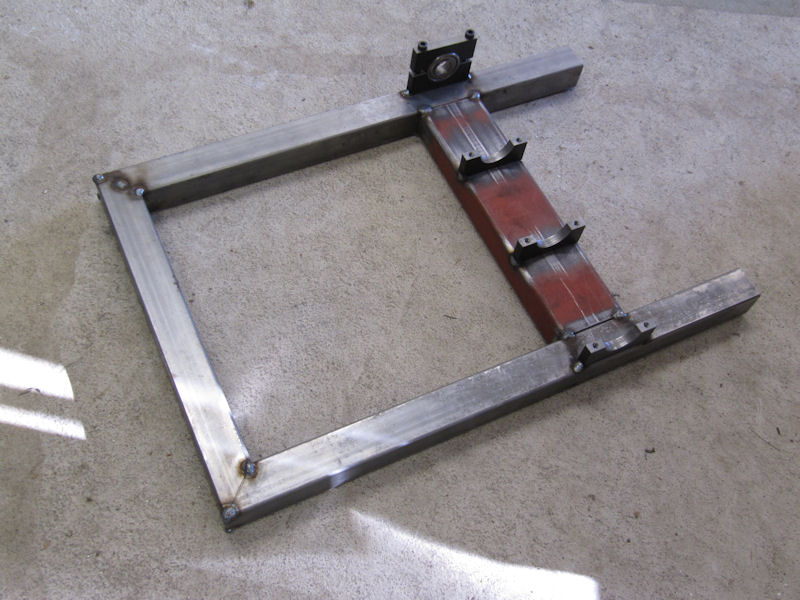
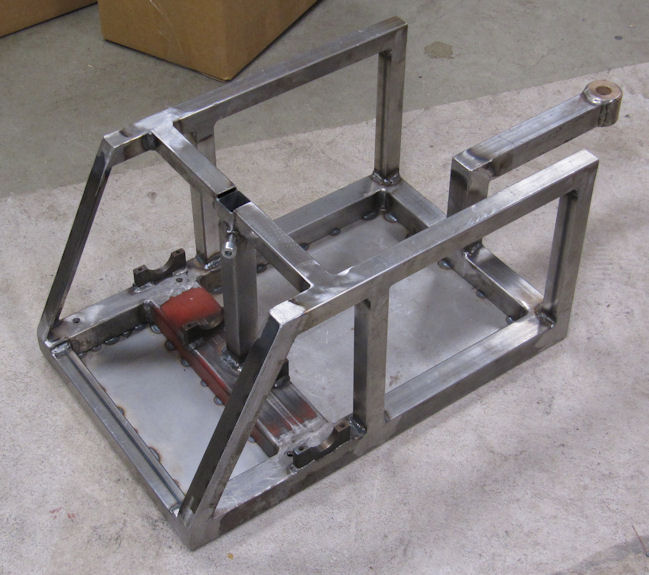
Sedan gjorde jag 4 st lagerbockar, det tog MYCKET längre tid än man kan tro! Lager 32x15x9. Plattjärn 60x8. M5 insexskruv.

Påbörjad och hop-punktad ram. Ytterram 30x30x2 fyrkantsrör, röret vid lagerbockarna 60x30x2.
Om ni undrar hur jag lyckas tillverka alla delarna så har jag god hjälp av bl.a. dessa maskiner. De är slitna, men det fungerar om man inte har så bråttom.
Örnsvarv 8" Modig Borr/Fräsmaskin Esab 180A Migsvets



Sådärja! Äntligen börjar det likna något

Dags för första motorfästet. Rörig bänk? Nä, det brukar vara värre!

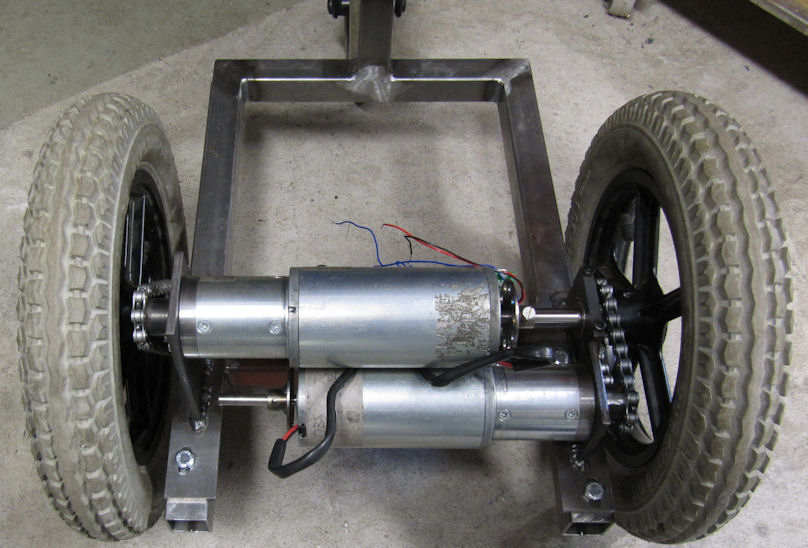
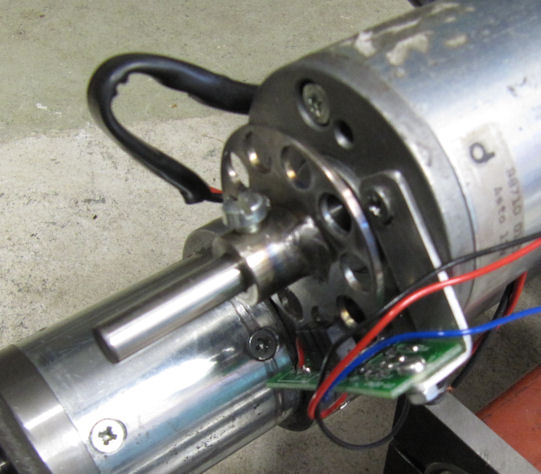
Nu sitter motorerna på plats! Var tvungen att provköra dom lite grann för att se om kedjor och drev lirade, verkar funka skapligt. Kollade hur fort de snurrade också, utan last snurrade dom 30 varv på 21 sek, ger ca 1,4 m/s = 5 km/h.
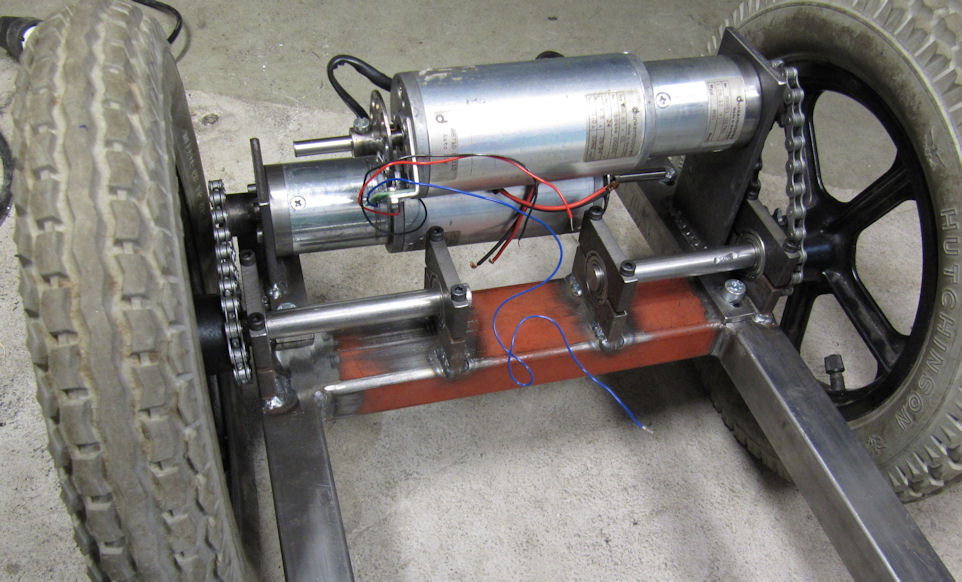
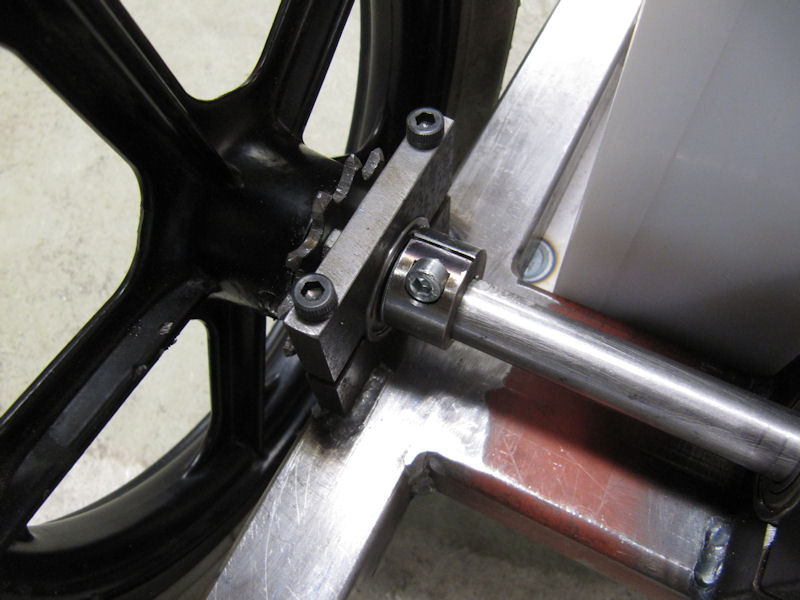
Närbild på kedja och drev

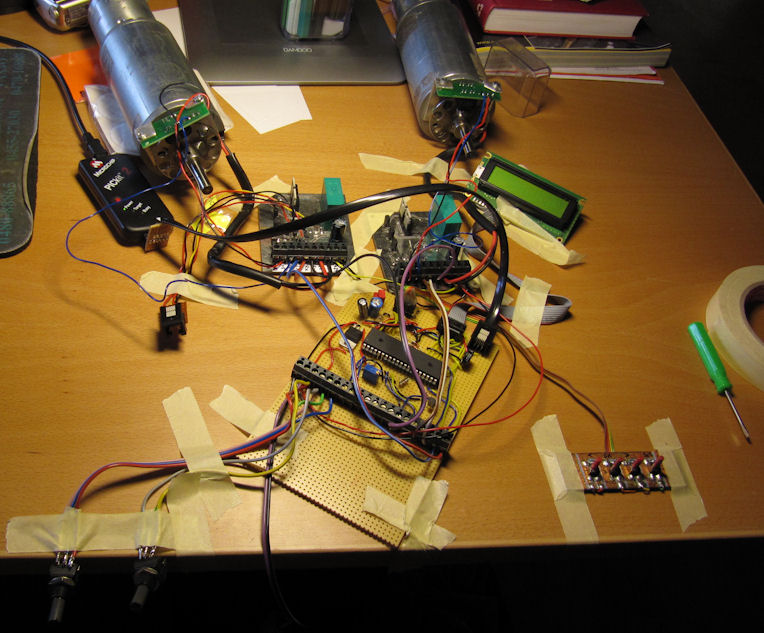
Jag styr motorernas hastighet med hjälp av en hemjord pulsmätare, 10 pulser/varv.
Ok, nu börjar mekaniken ligga före elektroniken, och det går ju inte för sig!
Men jag har faktiskt tjuvstartat lite med elektroniken innan jag började gör
denna hemsida. Hittills har jag gjort ett motorkort och börjat på ett moderkort.
Dags för lite elektronik-porr!
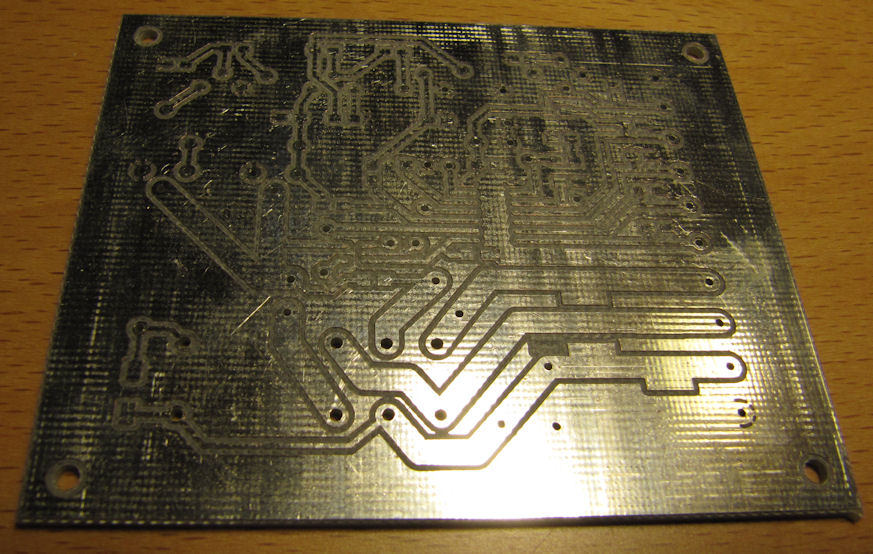
Kretskort till motordrivkort, dubbelsidigt, gjort med en kretskortsfräs.
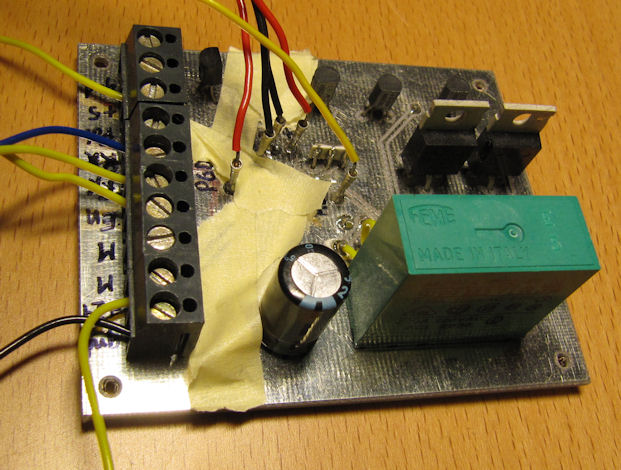
Motordrivkort med komponenterna monterade. Relä för att byta riktning på motorn, processor: PIC16F684, FETar: BUK555.
I/O på kort: Batteri Gnd, batteri + 24V, Motor +, Motor –,
Enable (ska vara 1 för att motorn ska starta), Rx till moderkort, Tx till
moderkort, PulseIn från rotationssensor,
+5V till sensor, Gnd till sensor, programmering 5 st "stift".
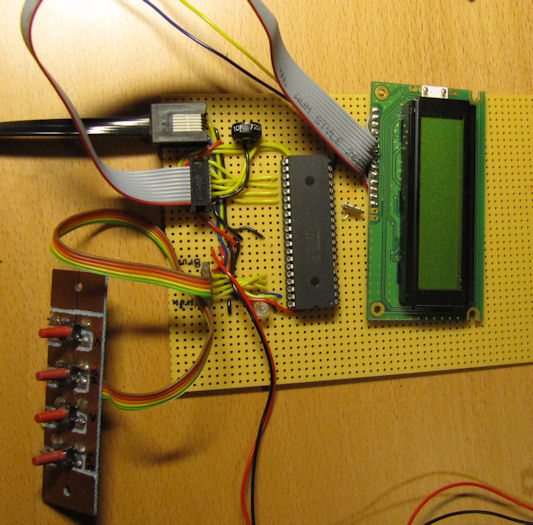
Påbörjat moderkort, gjort på experimentkort eftersom jag inte har riktigt klart för mig hur allt ska vara ännu. Processor: PIC18F4620, 16x2 LCD-display, 4st knappar till användarinterface.
I/O på kort: Batteri Gnd, batteri + 24V, LCD-display 10 st, “känselspröt” 5 st (4 st in + 1st 5V), interface mot användare 5 st (4 st in + 1st 5V), manuell körning 2st analoga in, 1 st enable, 1 st 5V, 1 st gnd, Tx till högermotor, Rx till högermotor, Tx till vänstermotor, Rx till vänstermotor, Tx till klippmotor, Rx till klippmotor, reserv I/O 2-4 st, programmering 5 st.
090811 Har borrat/fräst ihop ett par stopp till hjulaxlarna idag
(bilder nedan), har också lött (lödat?) färdigt motorkort 2 idag, snart så... :)
Har skaffat mig en egen domän också!
www.emcsweden.se :)


090813
Här sitter ena stoppet till hjulaxeln på plats, det hade väl funkat med en
slangklämma också antar jag, men hur kul hade det varit...
Har också svetsat fast ett "golv" till batterierna, nu börjar man fundera på
hur karossen ska se ut... kanske som en jätte-nyckelpiga?
Eller som en otäck skalbagge som smyger runt i trädgården... eller bara en trist
fyrkantig låda : ( Kom gärna med förslag!
Jag har också haft ett sidoprojekt senaste veckan, därför har det inte hänt
så mycket med trädgårdsroboten. Jag har tillverkat mig ett par olika stålhållare
till svarven.
Det är perfekt att ha såna här sparskär när man vill svarva en speciell profil
eller t.ex. en gänga.

090820
Har varit (och är) sjuk, så det har inte hänt så mycket senaste veckan, men jag
har nu kopplat samman båda motorerna med dess drivkort med moderkortet. Allt
verkar fungera bra, nu gäller det bara att knacka smart kod.
Jag har börjat skriva kod för manuell körning, en av potarna som syns i nedre vänstra hörnet ställer hastigheten. Den andra styr hur mycket man svänger, om den står i mitten går båda motorerna lika fort.
Kanske någon av er som läser detta är lite programmeringsfantast, så jag visar en kodsnutt hur jag läser av potarna. Koden måste nog förfinas senare, men den duger nog till att göra första provkörningen med.
// Kolla speedpot
SET_ADC_CHANNEL(1); //
delay_us(10); //
Sum = 0; //
for(i=1;i<17;++i){ // Ta 16 sampel
AD = READ_ADC(); //
Sum = Sum + AD; //
} //
AD = Sum / 16; //
AD = AD*5;
M1Speed = AD;
M2Speed = AD;
// Kolla steeringpot
SET_ADC_CHANNEL(0); //
delay_us(10); //
Sum = 0; //
for(i=1;i<17;++i){ //Ta 16 sampel //
AD = READ_ADC(); //
Sum = Sum + AD; //
} // //
AD = Sum / 16; //
if(AD > 515){ // Högersväng
Diff = AD - 512;
Diff = 1+(Diff/1000); // 1,004 till 1,512
M1Speed = M1Speed * Diff; // M1Speed + 0,4% till + 51%
M2Speed = M2Speed / Diff; // M2Speed - 0,4% till - 34%
}
else if(AD < 509){ // Vänstersväng
Diff = 512 - AD;
Diff = 1+(Diff/1000);
M2Speed = M2Speed * Diff;
M1Speed = M1Speed / Diff;
}
090824
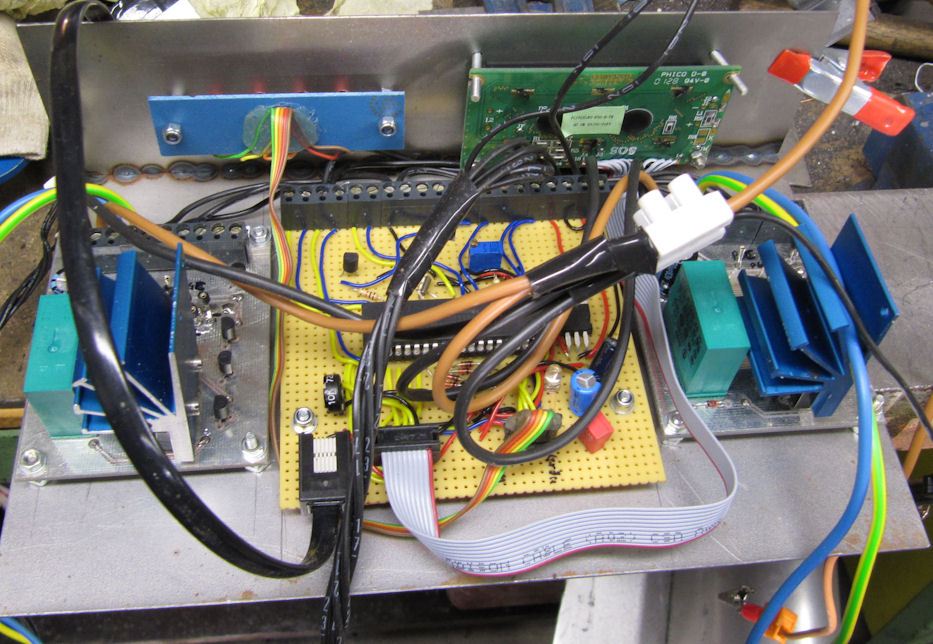
Nu har jag tillverkat en plåt där jag kan montera alla tre kretskorten,
knapparna och displayen, allt för att få så bra jordning mellan korten som
möjligt.
Ännu så länge har jag bara skärmad kabel mellan motorkort och pulsgivarna på
motorerna, men även motorkablarna ska väl bli skärmade så småningom.
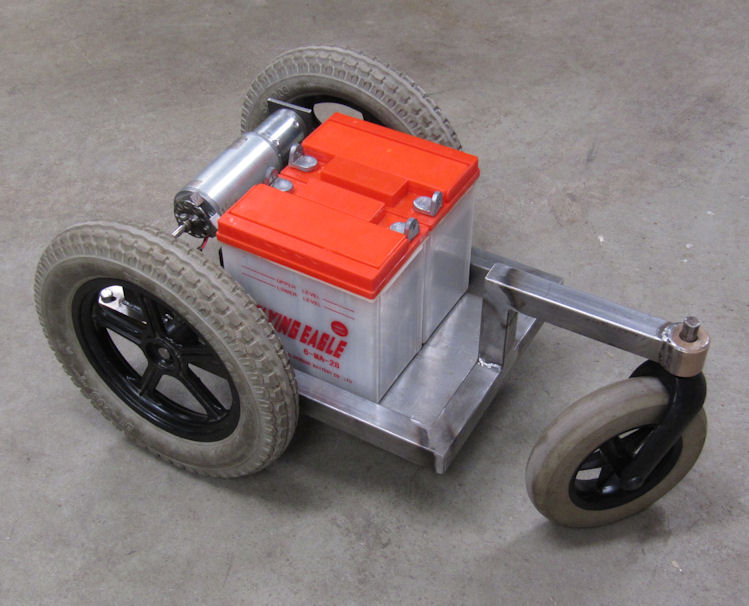
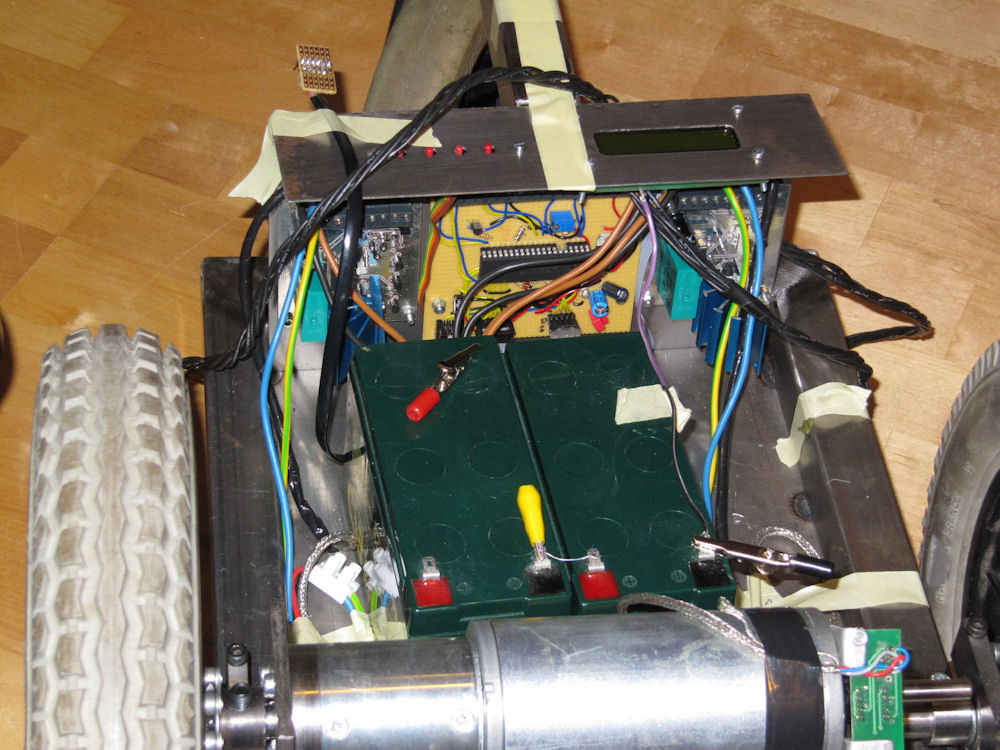
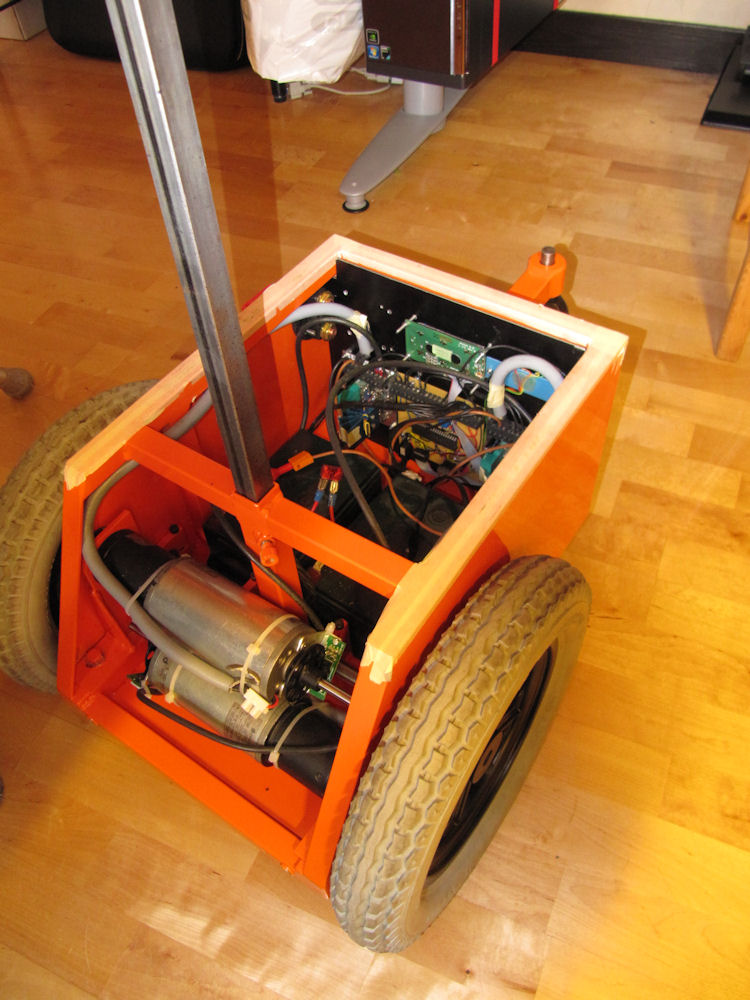
Här en bild på plåten med kretskorten monterade, plåten bara provisoriskt
fastsatt på ramen, man vill ju provköra snarast!
Batterierna är inte dom rätta, det ska vara dom lite kraftigare som jag visat
bild på tidigare. Jag har också gjort en provisorisk handkontroll så att man kan
köra den manuellt.
090825
Nu har jag gjort jungfruturen med "roboten", det funkar ganska bra, ett
litet hårdvarufel bara, jag har lyckats få ett av kuggdreven lite ovalt så
kedjan slakar och spänns om vartannat. Ingen fara med det, man få bara ha kedjan
lite slakare, det fixar jag lätt senare.
Barnen blev genast förtjusta i att springa runt med den i trädgården, jag
filmade lite med kameran, men jag vet inte hur jag ska få in den på hemsidan,
den är i .mov-format, någon som vet?
Jag kan säga att 4 km/h är ganska fort när man jagar den i trädgården!
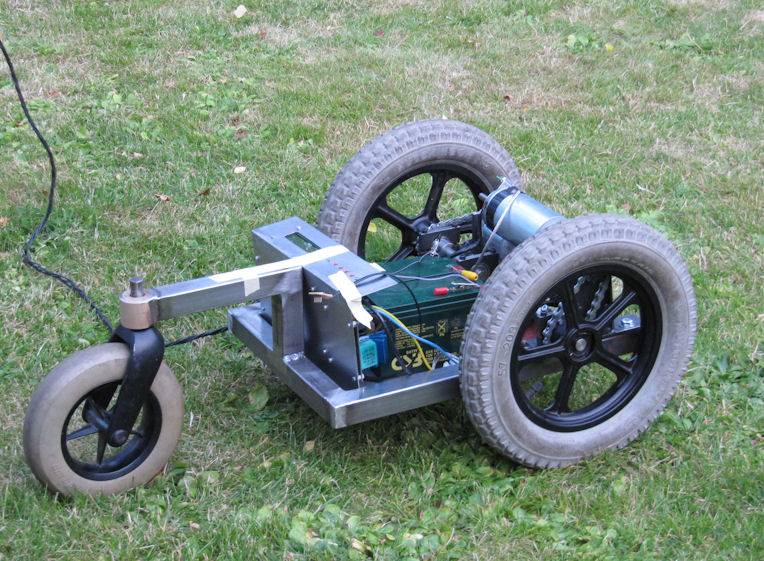
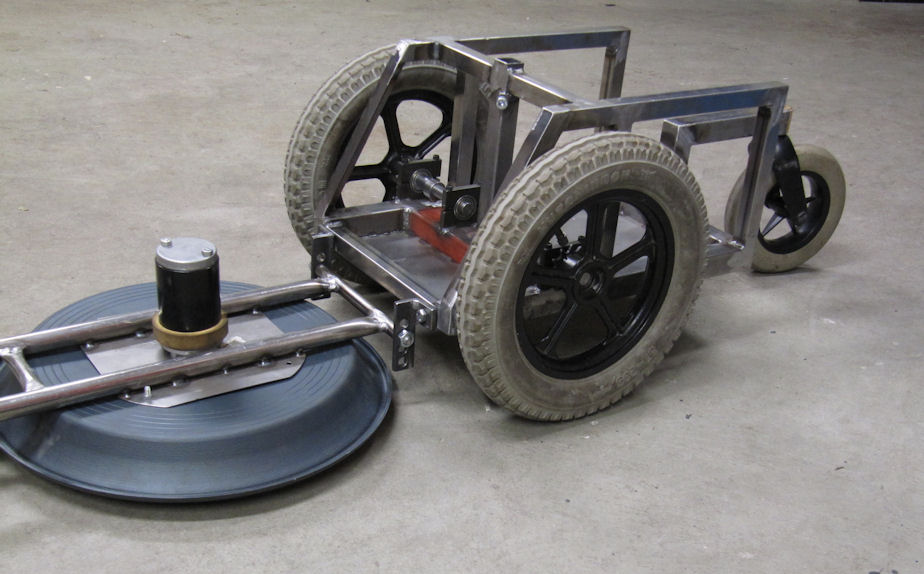
Max med nya trädgårdsmaskinen.

En annan vinkel...
090829
Har svetsat fast lite fyrkantsrör för att få en ställning att stå på, bilder
kommer senare. Nästa steg blir att få till någon slags styranordning så att man
kan stå på den och köra, man får ingen känsla för hur styrningen fungerar när
man står bredvid. Jag provade att sitta på den och köra lite ute i garaget, det
jag märkte var att jag nog får ändra koden så att ytterhjulet inte ökar i
hastighet när man svänger, utan att endast innerhjulet saktar ner. Johan (hette
han så?) och Tobias hade rätt! Tyvärr är det inte så lätt att övertyga mig om
något jag inte testat, men nu i detta fallet fick jag ge med mig.
Det känns som om jag har börjat tappa fart med bygget, jag börjar inse att saker och ting kommer att fungera ungefär som jag tänkt mig, och att "karossen" kommer att se ut som en ful sockerlåda. Det är problemlösningarna som inspirerar mig, och det mesta är löst nu, både elektriskt och mekaniskt, det är mest yttre design kvar, men jag får väl spotta i nävarna och hämta ny kraft! Och sen måste jag ju bygga klippaggregatet också, det var ju det som startade allt från början.
090903
Jag skulle inte sagt något om att alla problem var lösta... Jag har hållit
på en hel del med mjukvaran de senaste dagarna.
Problemet är att det sätt jag anger hastigheten inte är linjärt med den reella
hastigheten (se diagram nedan) vilket medför att när jag ställer hastigheten med
speedpoten så händer allt de sista 10-20 graderna. Med poten till styrning blir
det tvärtom, styrningen är för känslig runt mitten, och framförallt när man har
hög fart.
Genom att istället för att beräkna Diff med Diff = Diff / 200 (linjär kurva)
så beräknar jag Diff = (Diff * Diff) / 100000 (exponentiell kurva) så
kompenserar jag en hel del av olinjäriteten.
Detta blev kanske är lite för teoretiskt och tråkigt, jag får väl kasta in lite bilder snart, jag ville bara uppdatera lite så att ni ser att jag inte gett upp ännu.
090908
Har svetsat dit lite fler rör på ramen, nu ska det "bara" fixas ett skal också.
Har inte riktigt klart för mig hur jag ska göra... Har inte möjlighet att svetsa
aluminium så om jag ska ha ett "heltäckande" skal så får jag använda vanlig
plåt.
Har inte visat någon riktig bild på plåten med styrkorten förut så här kommer en.
Var på Plantagen i söndags för att se om jag kunde hitta en plasthink som jag skulle kunna såga av och använda som kåpa till klippaggregatet. Jag hittade inte någon hink med rätt mått, men då sprang jag på detta plastfat för jättekrukor, helt perfekt i storlek och djup! (dia 42cm, djup 4,5cm, 39;-) Jag tror inte jag behöver modifiera den alls, bara att förstärka i mitten och bulta dit motorn.

090914
Nu har jag provat klipparen lite snabbt. Jag satte dit snören från min
bensin-trimmer på klippmotorn och höll den bara i handen ovanför gräset, och
visst klippte den! Men va trögt det gick om man sänkte ned den lite så att den
stötte på lite mer kompakt gräs. Kanske jag skulle satsa på riktigt vassa
knivblad istället, tråden verkar gå rätt trögt och vara mycket energikrävade
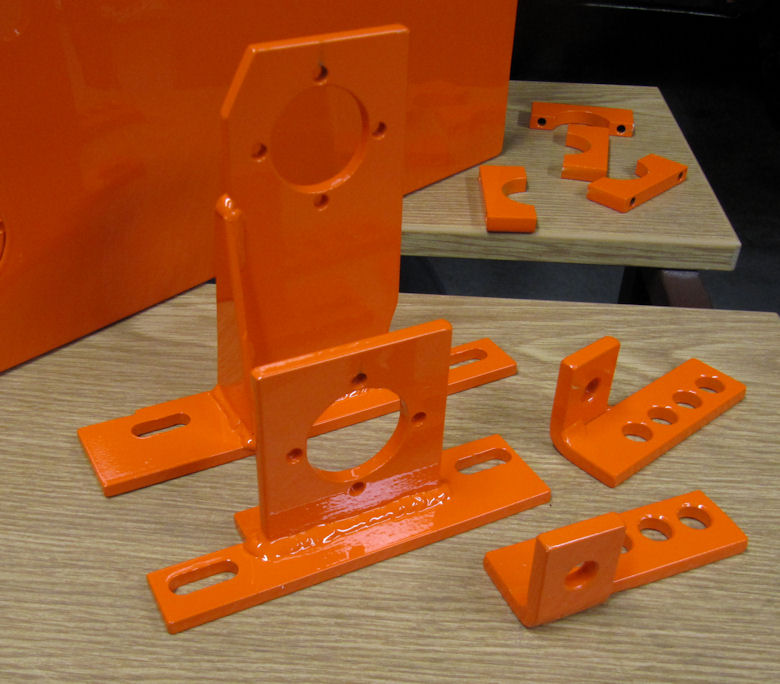
klippmotorn kommer att ta rätt många ampere verkar det som.
Vi får se, nu har jag i alla fall gjort fästen för klippaggregatet. Det främre stödhjulet blev så fruktansvärt fult och dåligt att jag inte ens vill visa det på bild, jag var tvungen att redigera bort det, jag återkommer med bild när jag konstruerat om det lite vettigare. Visst passade "krukfatet" från Plantagen perfekt!
090926
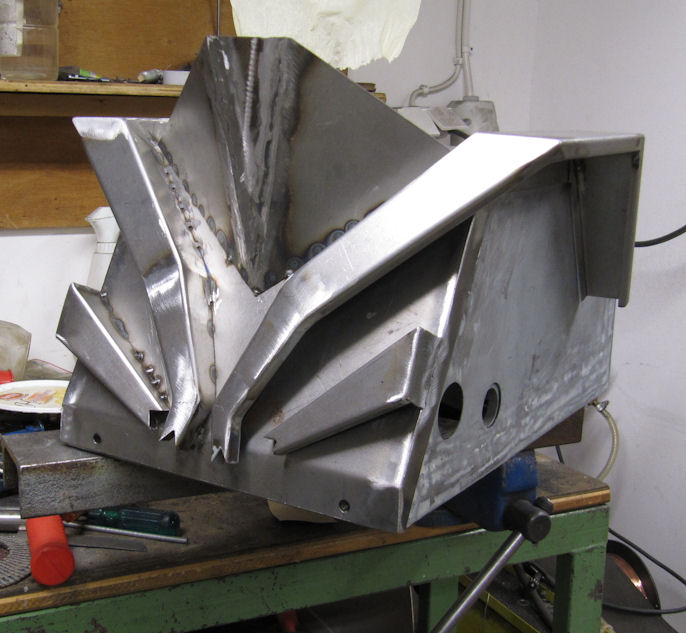
Länge sen jag uppdaterade men jag har inte legat på latsidan, bara att det inte har varit mycket att fota på. Har hållit på med plåtarbete, plåtarbete och åter plåtarbete, här kommer i alla fall lite nya bilder.
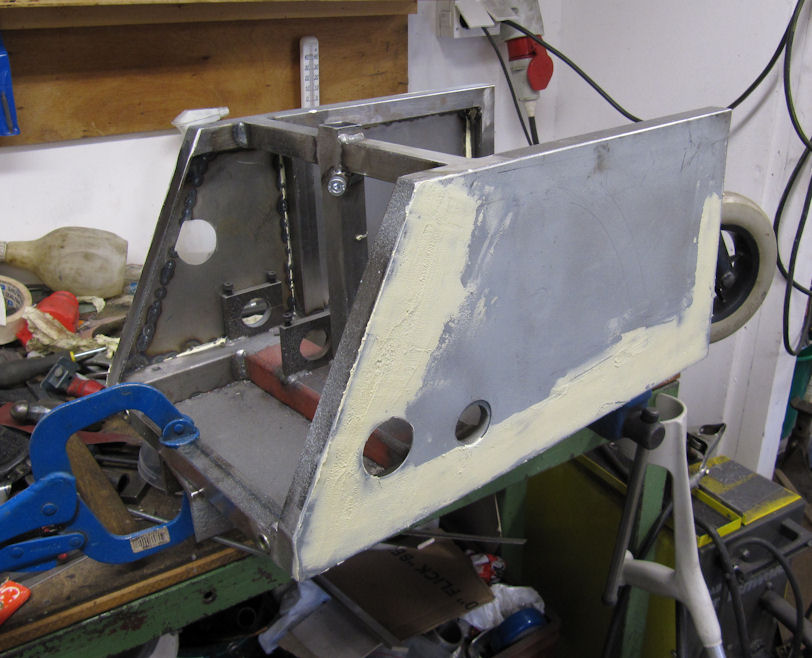
Skärm med "spindelben", ska försöka få den lite insektslik tänkte jag.

"Spindelben" monterat på huven

Sidoplåt fastsvetsad på ena sidan

Båda sidor svetsade o klara, ska börja spackla lite...
091013
Nu har det inte hänt något på ett bra tag, och tyvärr har jag inget att
komma med. Jag ville bara uppdatera för att ni ska se att jag lever. Har haft
ett sidoprojekt i samband med älgjakten, men nästa vecka ska jag försöka dra
igång med dragaren igen. (vitsigt va :) )
091019
Har varit igång med lite plåtarbete igen, jag har nog varit lite för seriös
med "chassie-biten" för nu börjar jag tröttna rejält på
plåtarbetet. Jag får nog göra bakdelen lite mindre seriös om jag ska komma
vidare, det går väl alltid att bygga på mer i framtiden.
Bägge "spindelbenen" fastsvetsade.

Extra "spindelben" och början på insekthuvudet, hade väl tänkt att baksidan skulle gå lite i samma stil, men jag orkar nog inte med det... just nu iaf.
091107
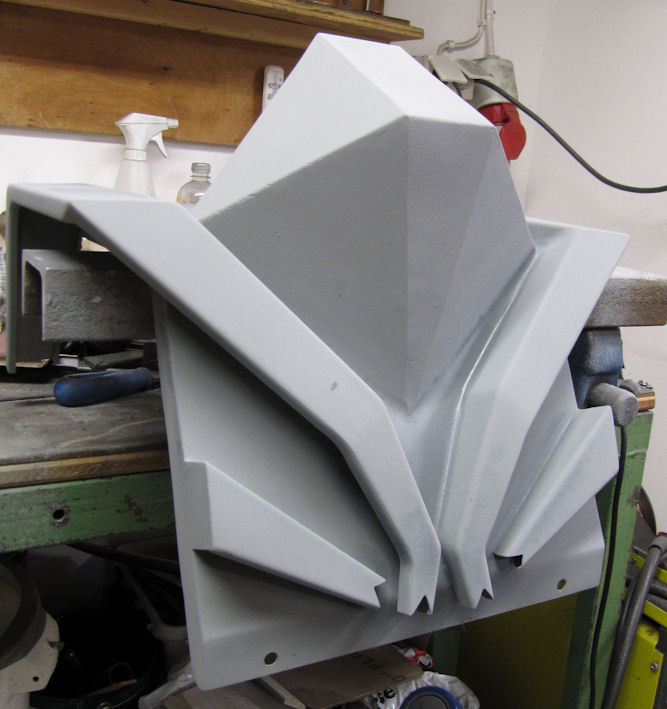
Nu har jag spacklat och spacklat... inte så jättemycket egentligen, jag har
varit lite slö.
Jag måste nog påminna mig om att detta inte är en utställningsbil, utan bara en
gräsklippare och sluta spackla nu!
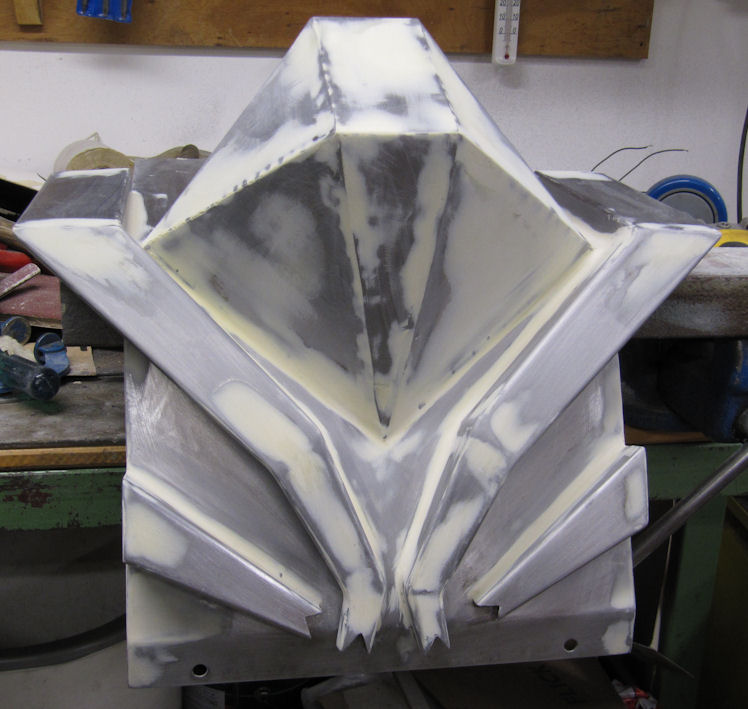
Var tvungen att provlacka lite för att se hur mycket mer jag behöver spackla.

Tja, det blev väl inte så illa va? Färgen är inte riktigt torr ännu, men det finns tyvärr lite skavanker att spackla vidare på.
091118
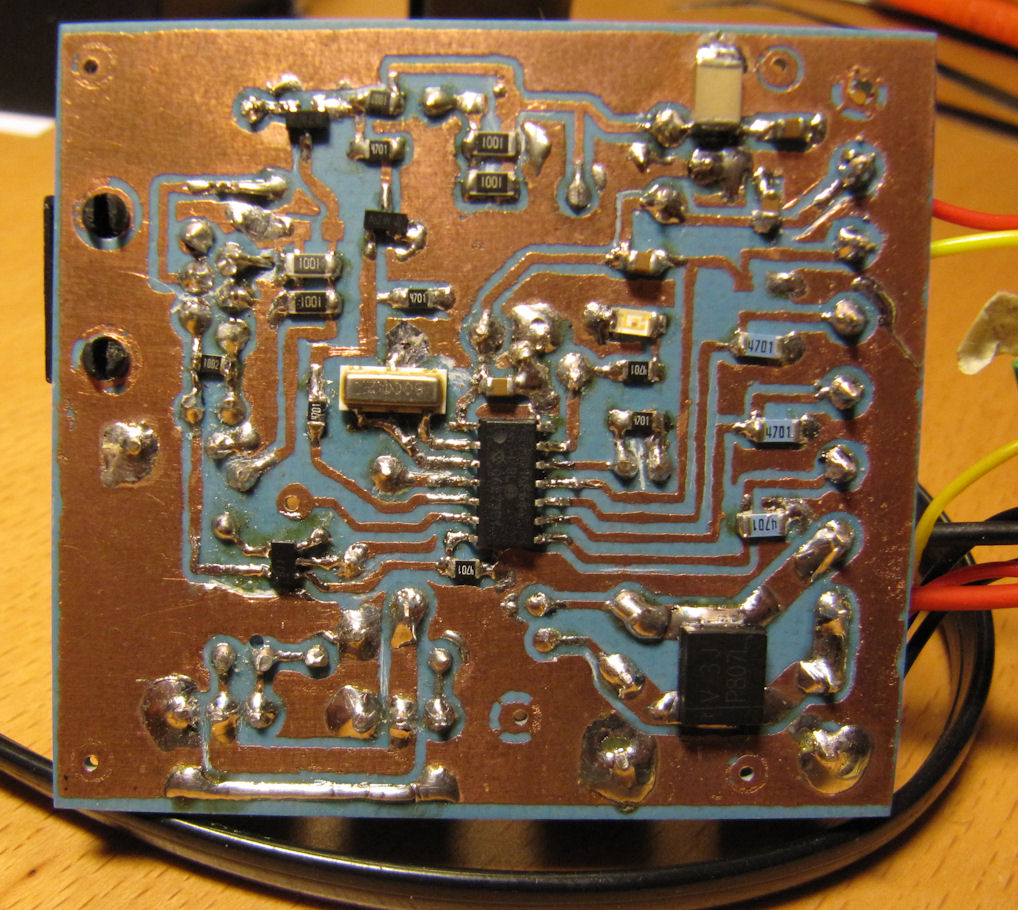
Har inte hänt så mycket på senaste tiden, jag måste skärpa till mig nu!
Här är i alla fall vad jag sysslat med den sista tiden, mitt första hem-etsade kretskort. Det är driverkortet till klippmotorn, jag gjorde det med "laserskrivarmetoden" om ni vet vad jag menar (Tack Jan på ABB för inspirationen som fick mig att prova).
100209
Äntligen en uppdatering! Nu trodde ni att jag lagt ner projektet va? Nej men jag har haft en del sidoprojekt faktiskt (om ni tjatar kanske jag visar dom också):
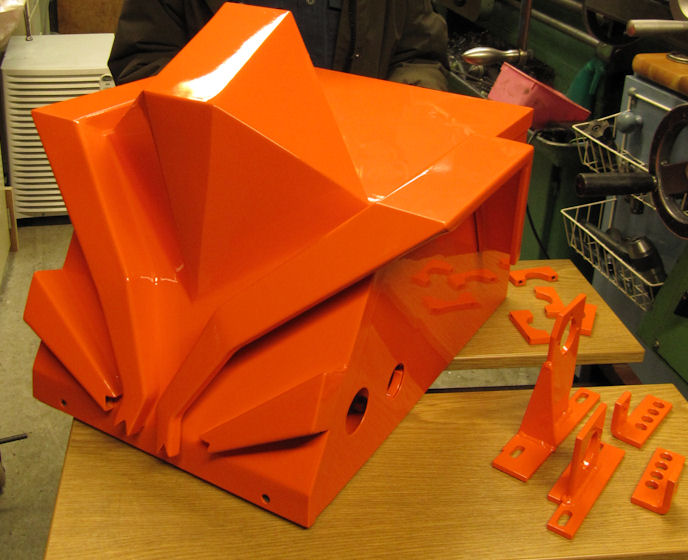
Nu är äntligen chassiet lackat, det har tagit lite tid för vädrets makter har
varit emot oss (det är rent besvärligt att få upp värmen i en lackbox med 20
minus ute).
Så nu måste jag sätta fart med monteringen och tillverkningen av de sista
delarna, här kommer lite bilder på underverket.
Jag ville ju ha en skarp färg, så som många insekter har, och det blev det! Den är lite ljusare i verkligheten, "benen" ska bli svarta sen...

Utan lock...

Vill ni också ha riktig billack på era grejor? Ola Carlsson gör ett bra jobb för ett bra pris, 0730-728272.
100214
Maskering inför lackering av mattsvart...

"Huvudet" är gjort med självhäftande plast, fast jag är inte helt nöjd med resultatet så jag kanske gör om det senare.

En annan vinkel

20100326
Har inte kommit så långt som man tycker att jag borde ha gjort efter så lång
tid.
Jag har hållit på och försöka få till en hyfsad mjukvara men har under mitt
experimenterande stött på ett annat jätteproblem.
Suck!
Jag var så nöjd med att ha hittat motorer som hade planetväxlar istället för
snäckväxlar, just därför att förlusterna är så små i sådana. Nu får jag skit för
detta, motorerna går så lätt att jag får problem att svänga. Jag har tillverkat
ett par reglage (se bild nedan) så att jag kan stå på den och köra omkring i
huset för att testa mjukvaran. Då insåg jag att när jag ska svänga så ökar det
yttre hjulet farten precis som det ska, men innerhjulet går så lätt att det inte
saktar av tillräckligt även om motorn får noll energi.
Detta är nog bara ett fenomen som uppstår när jag åker med på den trodde jag,
(eftersom jag väger en del :( ), när den får gå själv så funkar det nog. Därför
gav jag mej ut på garageuppfarten som lutar en aning och testade dels med att
åka på den och dels att låta den köra själv. KATASTROF! Hjulen går så lätt att
den svänger åt det håll som det lutar, och minsta motstånd på ena hjulet gör att
det blir svårt att svänga åt andra hållet. Vad som kommer att hända när jag
hänger på klippaggregatet kan man ju gissa. Visst, man kan ju stanna och backa
med ett hjul och köra det andra framåt och på så vis få den att svänga men så
fort det lutar så kommer den ju att svänga av sig själv. Inget att klippa
grässlänter med precis!
Vän av ordning undrar säkert varför jag inte helt enkelt slår back på den motor
som går för lätt? Jag använder ett relä för att byta riktning på motorn, det
slår om för långsamt för att det ska fungera mjuk och fint, dessutom skulle det
bränna sönder relät ganska fort, en simpel lösning som var enkel o billig som
visade sig vara FÖR simpel.
Vad göra?
Bryta ihop o kasta skiten? Ja, en lockande tanke... Som jag ser det har
jag två alternativ.
Antingen gör jag en broms på motoraxlarna som gör att motorerna bromsar sig
självt när man sänker spänningen till dom, eller måste jag bygga nya drivkort
med fullbrygga som kan aktivt gå in och kortsluta motorn alt. lägga på en
mot-EMK. Att bromsa motorerna mekaniskt innebär energiförluster i form av värme
och kortare batteritid, det är enklast men också vad man kallar en ful-lösning.
Att göra nya drivkort med full H-brygga är inget för amatörer, motorerna ska
kunna matas med upp till 20A så det är inga klena transistorer som ska styras.
Jag är inte övertygad om att jag klarar detta, och även om jag klarar det så
kommer det ju att ta lång tid att utveckla ett sånt kort.
Vad ska jag göra? Någon som har en åsikt?
Hastighets- och styr-reglage för manuell körning

Såhär ser den ut för närvarande
Panel med LCD-skärm och knappar, kommer att snyggas till

20100327
Som jag misstänkte så fungerade styrningen perfekt när motorerna blev bromsade!
Jag gjorde provisoriska bromsar på motoraxlarna med hjälp av ett par läderbitar
som jag spände med stripes, se bilden nedan.
Nu är bara frågan hur man ska lösa det... vore ju bra med en broms som man kunde
aktivera elektriskt just när man behöver.

20100501
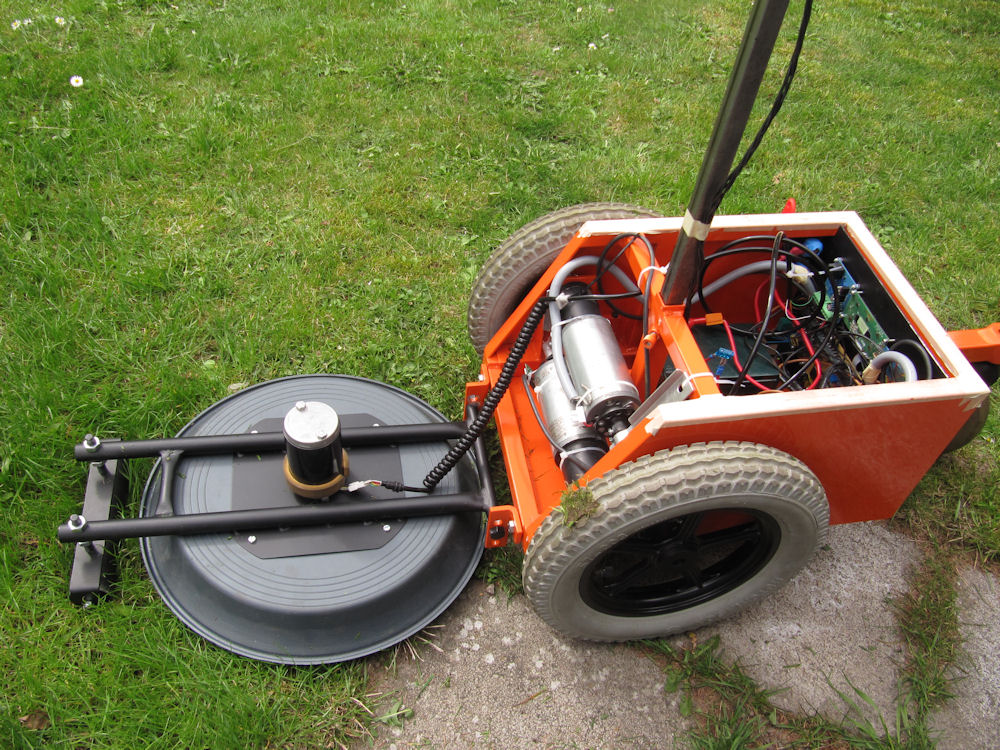
Äntligen har jag testat att klippa gräs! Fungerade ganska bra faktiskt, det enda egentliga problemet var att det fastnade gräs på kniven, får se om jag kan konstruera om den lite.
![]() Här
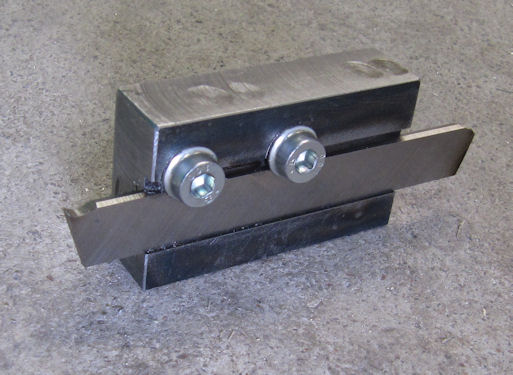
ser man en av "klämmorna" som jag gjorde för att motoraxlarna inte ska snurra
för lätt, en aluminiumklämma med läder mot axeln.
Här
ser man en av "klämmorna" som jag gjorde för att motoraxlarna inte ska snurra
för lätt, en aluminiumklämma med läder mot axeln.

Såhär såg det ut efter en stunds klippning, och det genererar mer luftmotstånd än man kan tro. Eftersom jag är rädd om energin i batterierna så måste jag nog lösa detta på något sätt.

Nu ska bara "insektskåpan" på också för att förbättra utseendet lite mer.
Kvar att göra: "Känselspröt" så att man inte behöver sitta och vakta den hela
tiden. Fylla batterisyra i de rätta batterierna, nu använder jag små
gelbatterier. Snygga till "styret" med manuella reglagen. Sen är det bara att
skriva listig kod så att den klipper så effektivt som möjligt. Just nu har jag
ett program som kör fram och tillbaka som i en solfjäder, så att resultatet blir
som blombladen på en jätteblomma.
Skulle också ha lagt in en film från klippningen, men jag får det inte att fungera.
Testar o länka till youtube... bara för o se om det funkar...
20100526
Har inte hänt så mycket sen senaste
uppdateringen, jag har mest jobbat med mjukvaran. När jag fixat en bugg dyker
det upp två nya. När man skriver ett program till en så här pass
"farlig" maskin får man tänka lite annorlunda, man måste ha både
hängslen och livrem. Man kan inte bara skicka iväg ett kommando till
drivmotorerna och hoppas på det bästa, utan man måste försäkra sig om att
det uppfattades helt rätt, ett enda missuppfattat kommando kan ju få
förödande följder. Dessutom måste moderkortet alltid stå på tå och kolla
om drivkorten vill skicka nödrop att något gått åt skogen och bryta
säkerhetsrelät.
Så problemet är inte att skriva koden så att den gör det man vill, problemet
är att få den att ta sig igenom programmet utan att fastna i någon av alla
förreglingar, nålsögon, dubbelkollar, mm. Men jag tror att jag är nära nu,
väntar bara på bättre väder så att jag göra lite mer långtidstester
utomhus.
20100826
EXAKT 3 månader sen senaste uppdateringen... Nåväl, vad det gäller klipparen
har det inte hänt så jättemycket.
Först så har jag provat att ha "känselspröt" fram och bak på klipparen, men det
fungerade inte så bra tack vare att jag inte orkade bygga en sarg runt
gräsmattan. Det var tvunget att vara ett distinkt hinder annars stannade den
inte, med följden att givarna förstördes.
Sedan har jag köpt en radiostyrning till den, och det fungerar faktiskt
riktigt bra. Supersmidigt att kunna klippa under studsmattan utan att flytta den
:)
Jag har också tillverkat en ny kniv till klipparen av en gammal vedkapsklinga,
jag gjorde en hel kniv som är vass hela vägen inifrån och ut. Det verkar som om
den går mycket lättare än den gamla med lösa mattknivsblad.
Nu fungerar det mesta ganska bra, och därför tappar jag som vanligt inspirationen. Nu vill jag ha nya utmaningar, antingen bygga om den till banddrift, eller bygga on den till något annat kul, eller helt enkelt låta den bli stående i ett hörn som mina andra projekt.
Radiostyrning och dosa för manuell styrning.

Jag har haft lite sidoprojekt under sommaren, bl.a. så har jag svetsat ihop mig en hydralpress. En 20 tons domkraft, några kraftiga balkar, två tryckluftskolvar (tack Anders) och lite plock från en skrotad ytmonterings-maskin så var saken klar. Jag använder domkraften till att pressa nedåt och tryckluftskolvarna till att trycka upp domkraften igen. Första testet var en tom ölburk, den blev bara 3-4 mm tjock! Den ingår numera i barnens samling "pressade saker" där det ingår bl.a. golfboll, legobitar, leksaker mm. Alla sakerna har blivit utsatta för 20 tons tryck av två förtjusta barn.
Ett annat projekt eller vad man ska kalla det är min nya bil, en Suzuki Vitara -91 4x4. Den är tänkt att fungera som jakt/fiske-bil, snövessla, terräng-leksak eller bara som reservbil.
Den ser inte så "vild" ut med originalhjul...

Jag har skaffat andra fälgar, tillverkat 30mm spacerplattor och köpt nya däck
(31x10,5x15)
Och visst ser den väl lite roligare ut nu?

Liten och smidig och lättparkerad är den i alla fall...

Efter att dessa bilder är tagna så har jag köpt nya längre fjädrar så den är
ca 2" högre nu än på bilderna. Nästa steg blir att skaffa skärmbreddare till
den, det ser LITE FÖR vilt ut just nu när däckmönstret sticker ca 3cm utanför
skärmkanterna.
Funderar också på att bygga om lysena och fronten på den, jag tycker den ser ut
som en 80-tals Skoda framifrån, urrrk!
20110622
Ett litet experiment som jag gjorde häromkvällen var att se om detta funkade:

Det klippte ganska bra, men den blev nästan omöjlig att styra eftersom (som tidigare påtalats) det hjulet som ska gå saktare rullar med alldeles för lätt.
Fina förslag och kommentarer mottages gärna på
ulf@emcsweden.se
Fortsättning följer nog inte, men det är alltid nya projekt på gång...